UPDATE: The CH-47
body is no longer available for online ordering. I'm
leaving these pages up for reference for modelers currently
working on this build. Please contact me with any
questions.
Click here for
assembly notes for the heli mechanics.
Click here
for assembly notes for the body shells.
Click here
for tips on assembling the engine pods.
Scale:
1/24
Rotor Span: 25.4"
Body Length: 25.6"
Weight RTF: 40 OZ

Here's
the
Chinook
ready for another sortie. The 'Hook is a modest-sized
and affordable project, but it's a little more challenging to
fly than most conventional tailrotor helicopters. The
complex drive train is also targeted toward more experienced
builders.

Here's the CH-47 on an early test flight. Note
the characteristic nose-high attitude in hover. The
Chinook was designed this way so that it would assume a level
attitude in cruising flight, making for a more comfortable
ride for the crew and passengers.

Here's another shot of the Chinook hovering on an
early test flight. Note that the rotors are synchronized
to be 90 degrees out of phase. The Chinook requires gyro
damping on both yaw and pitch, and four custom mixers control
lateral cyclic and DCP (differential collective pitch) on the
front and aft rotors.

Here's the Chinook climbing
out. The tandem rotor system is very efficient, and the
CH-47 hovers on just 10 amps of current.

This photo shows the Chinook with one body shell
removed. As you can see, the hardware installation is
pretty snug. The aluminum truss is the main structural
member, providing a frame for the helicopter mechanics and the
drive shaft that connects the two rotor systems
together. The truss is tilted 6.5 degrees relative to
the Chinook's body to give the two rotors their proper
orientation (this accounts for the 'Hook's characteristic
nose-high attitude in a hover). Power is provided by a
Scorpion HK-2221-12 motor, a Castle Creations Phoenix 35
controller and a 2200-3S lithium polymer battery.
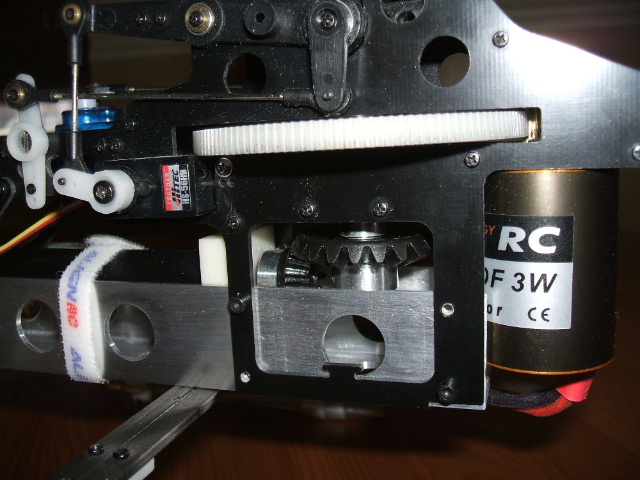
This
photo shows the CH-47's mechanics. I used crown and
bevel gears from the popular Corona 120 helicopter to
fabricate the drive shaft assembly. You can see that
the pitch servo pushrod has been screwed to a rigid post
to disable pitch input. Just two servos (roll and
collective) control each rotorhead. The fiberglass
side frames of the Revo-CP helis I used to build the
prototype made mounting them to the aluminum truss
relatively easy.